误差及梯度下降-李宏毅机器学习
一、Error的来源
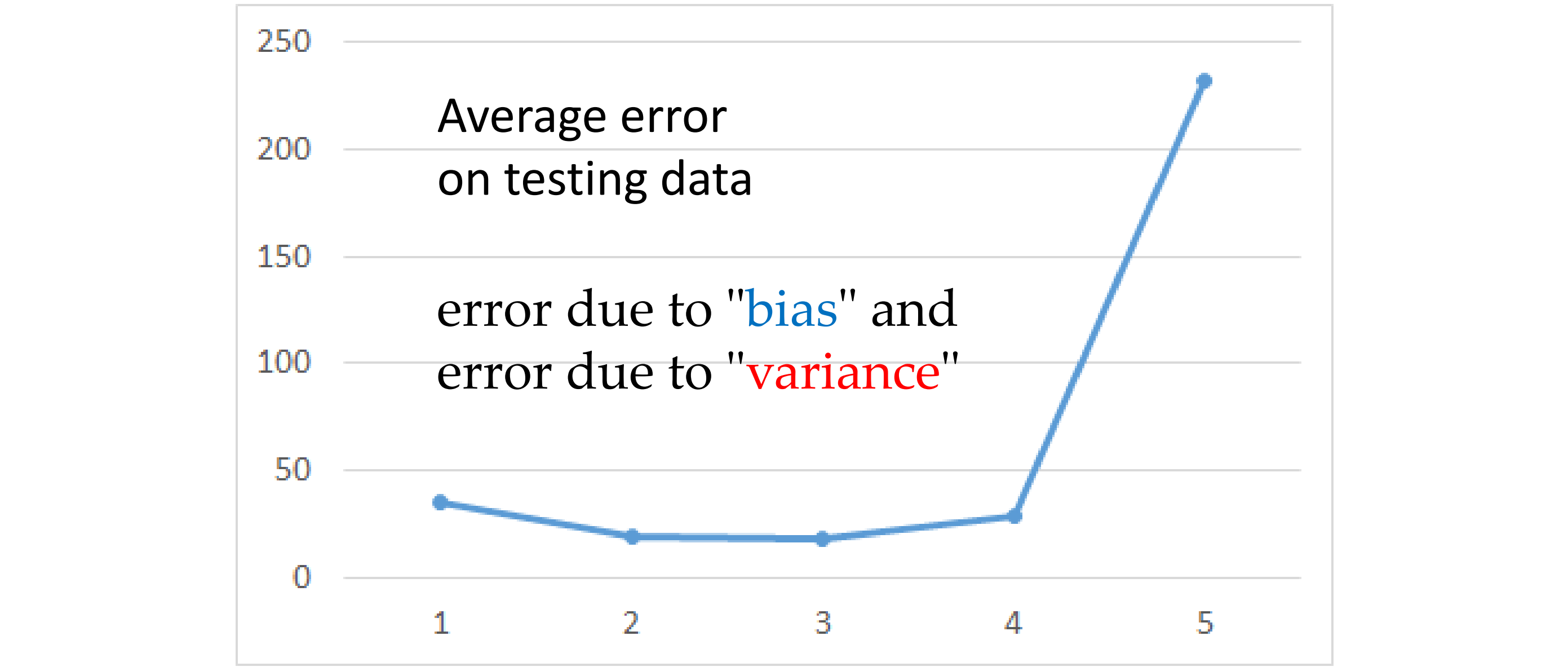
从上节课测试集数据来看,$Average\ Error$ 随着模型复杂增加呈指数上升趋势。更复杂的模型并不能给测试集带来更好的效果,而这些 $Error$ 的主要有两个来源,分别是 $bias$ 和 $variance$ 。
然而 $bias$ 和 $variance$ 是什么?可以查看 机器学习中的Bias(偏差),Error(误差),和Variance(方差)有什么区别和联系?
1.估测
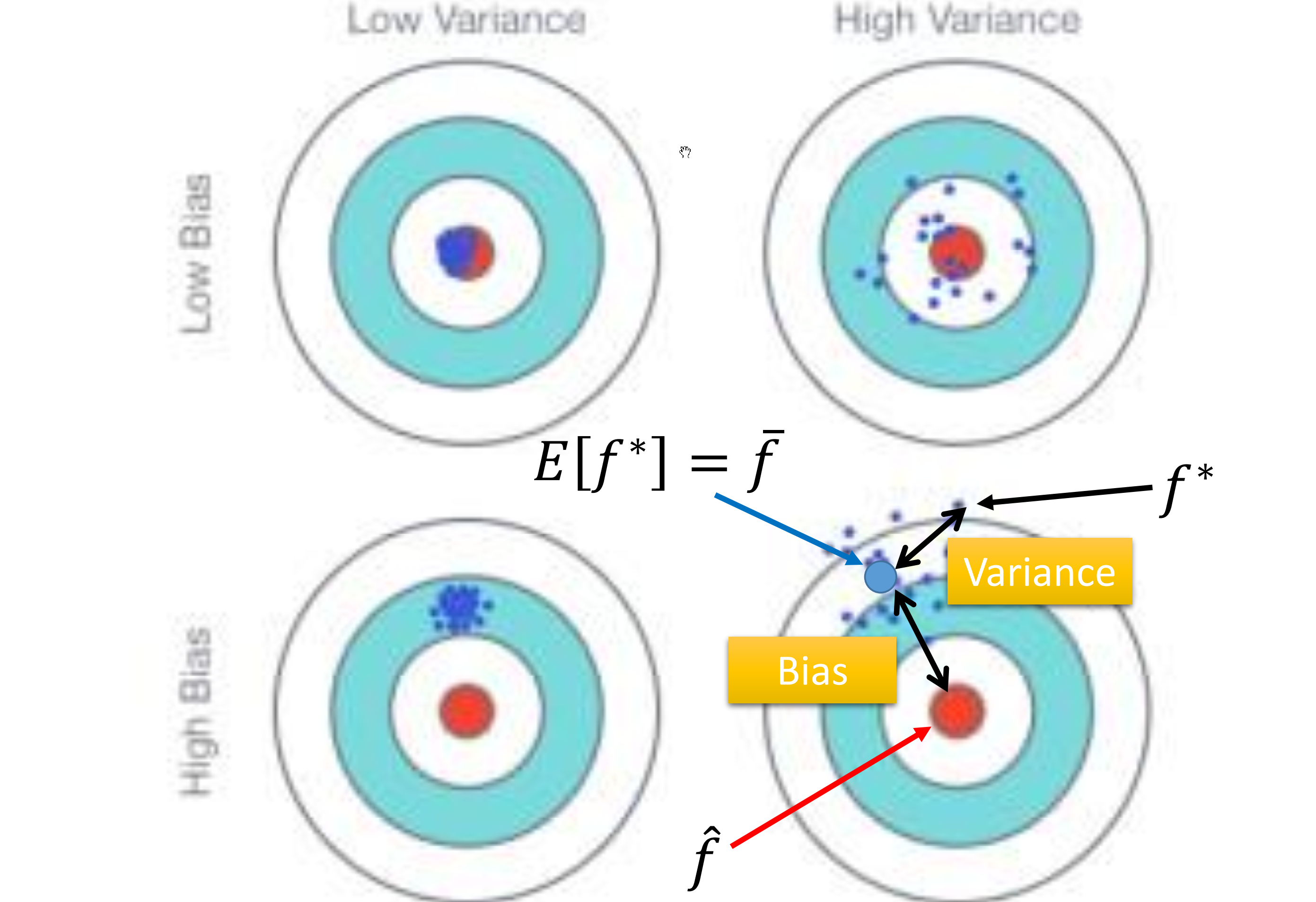
假设真实的模型为 $\hat f$ , 如果我们知道 $\hat f$ 模型,那是最好不过了,但是 $\hat f$ 只有 Niamtic 公司才知道。
所以我们只能通过收集 Pokemon精灵 的数据,然后通过 step1~step3 训练得到我们的理想模型 $f^*$,$f^*$ 其实是 $\hat f$ 的一个预估。
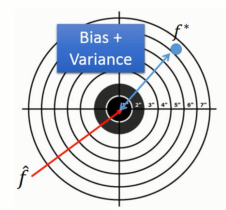
这个过程就像打靶,$\hat f$ 就是我们的靶心,$f^*$ 就是我们投掷的结果。如上图所示,$\hat f$ 与 $f^*$ 之间蓝色部分的差距就是偏差和方差导致的。
估测变量x的偏差和方差
我们先理解一下偏差和方差是怎样计算的呢? 偏差(Bias)和方差(Variance)——机器学习中的模型选择
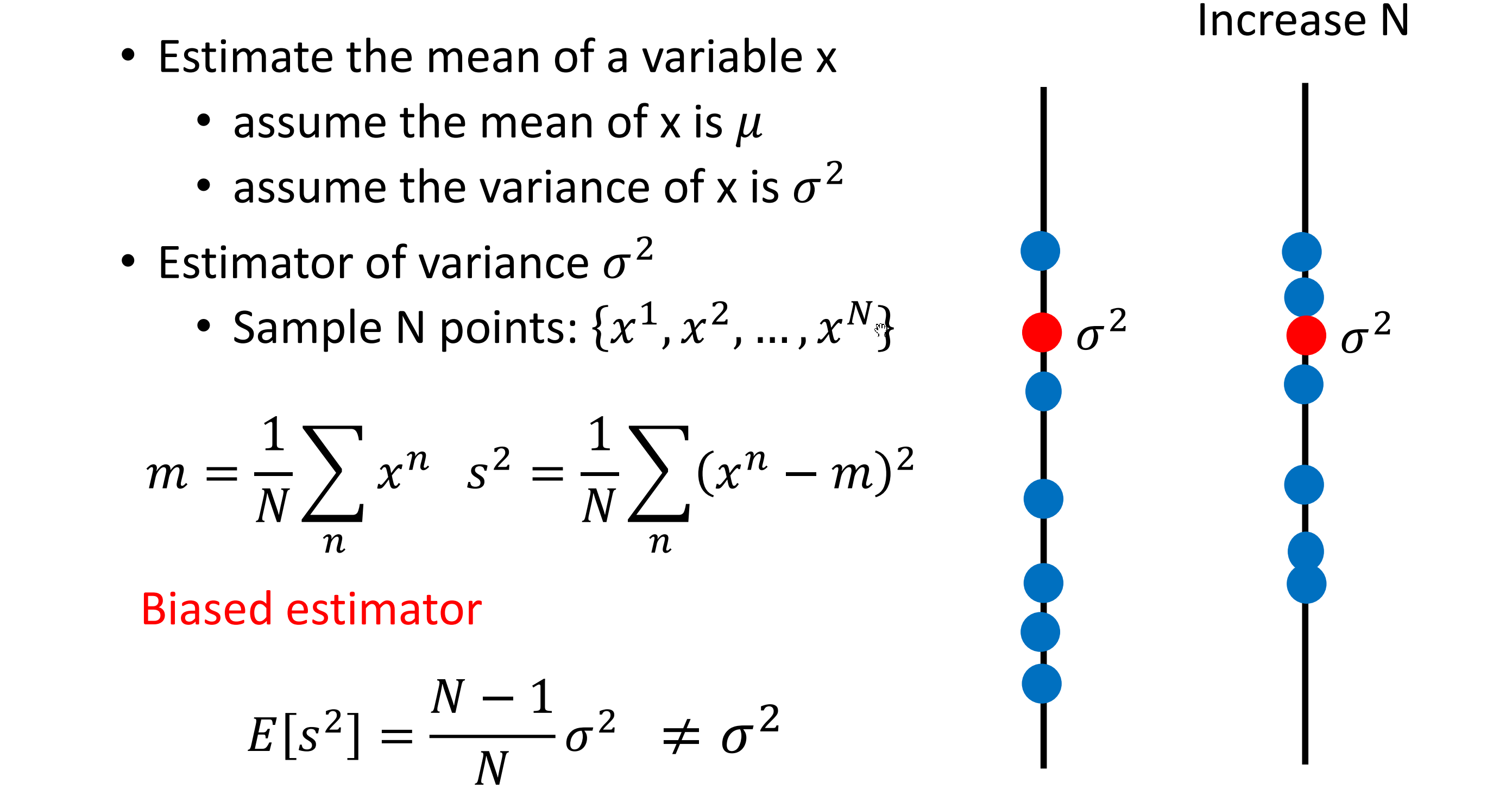
评估x的偏差
- 假设 $x$ 的平均值是 $\mu$,方差为 $\sigma^2$
评估平均值要怎么做呢?
- 首先拿到 $N$ 个样本点:${x^1,x^2,···,x^N}$
- 计算平均值 $m$, 得到 $m=\frac{1}{N}\sum_n x^n \neq \mu$

但是如果计算很多组的 $m$ ,然后求 $m$ 的期望:
$$E[m]=E[\frac{1}{N}\sum x^n]=\frac{1}{N}\sum_nE[x^n]=\mu$$
这个估计呢是无偏估计(unbiased)。
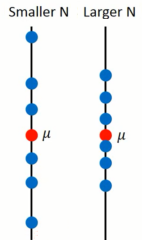
然后 $m$ 分布对于 $\mu$ 的离散程度(方差):
$$Var[m]=\frac{\sigma^2}{N}$$
这个取决于 $N$,下图看出 $N$ 越小越离散:
估测变量x的方差
如何估算方差呢?
为什么会有很多的模型?
讨论系列02中的案例:这里假设是在平行宇宙中,抓了不同的神奇宝贝
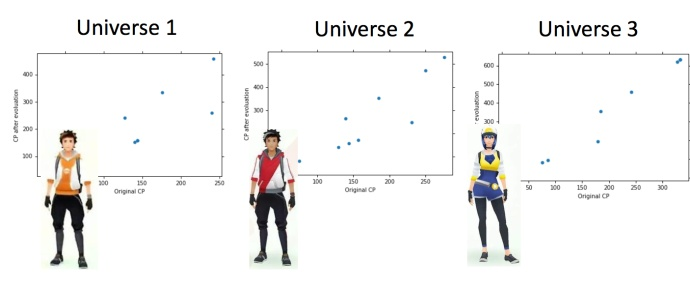
用同一个model,在不同的训练集中找到的 $f^∗$ 就是不一样的
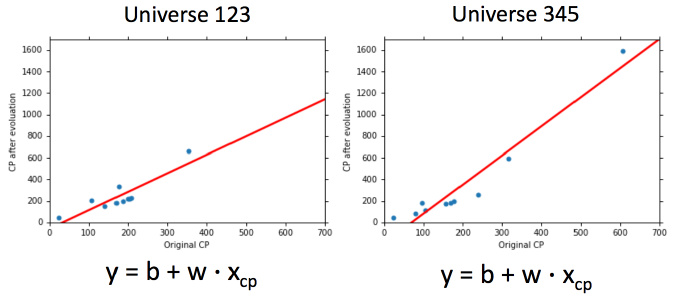
这就像在靶心上射击,进行了很多组(一组多次)。现在需要知道它的散布是怎样的,将100个宇宙中的model画出来
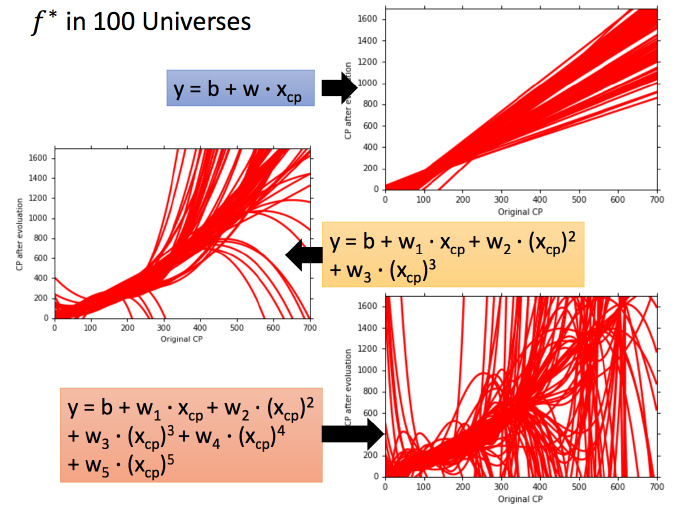
不同的数据集之前什么都有可能发生—||
考虑不同模型的方差
一次模型的方差就比较小的,也就是是比较集中,离散程度较小。而5次模型的方差就比较大,同理散布比较广,离散程度较大。
所以用比较简单的模型,方差是比较小的(就像射击的时候每次的时候,每次射击的设置都集中在一个比较小的区域内)。如果用了复杂的模型,方差就很大,散布比较开。
这也是因为简单的模型受到不同训练集的影响是比较小的。
考虑不同模型的偏差
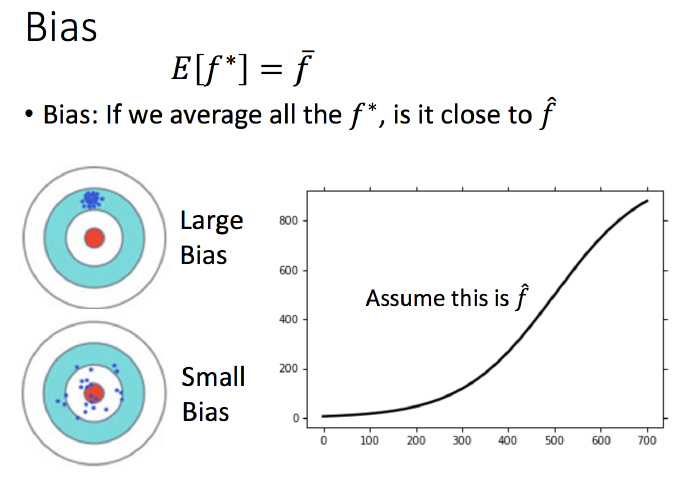
这里没办法知道真正的 $\hat{f}$,所以假设图中的那条黑色曲线为真正的 $\hat{f}$
结果可视化,一次平均的 $\bar{f}$ 没有5次的好,虽然5次的整体结果离散程度很高。
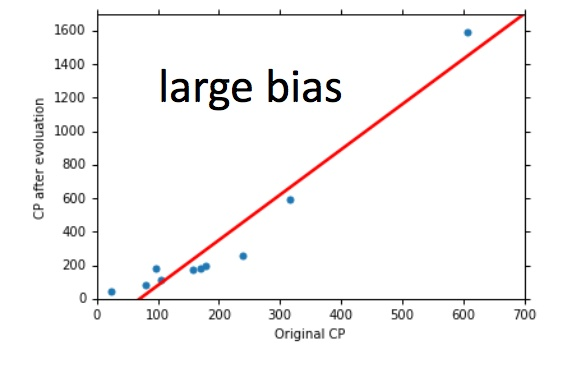
一次模型的偏差比较大,而复杂的5次模型,偏差就比较小。
直观的解释:简单的模型函数集的space比较小,所以可能space里面就没有包含靶心,肯定射不中。而复杂的模型函数集的space比较大,可能就包含的靶心,只是没有办法找到确切的靶心在哪,但足够多的,就可能得到真正的 f¯f¯。
偏差v.s.方差
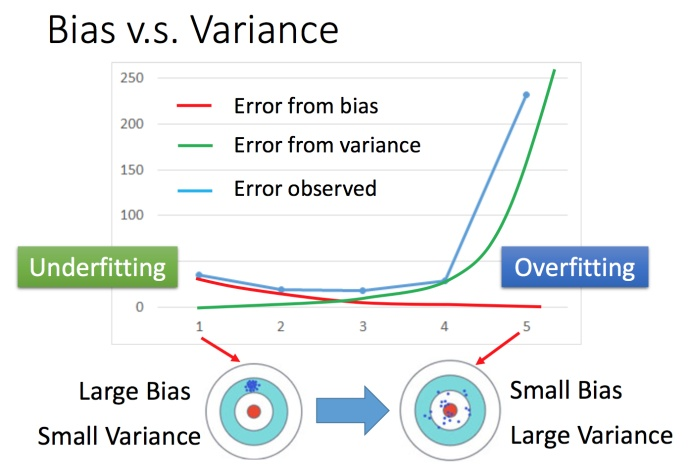
将系列02中的误差拆分为偏差和方差。简单模型(左边)是偏差比较大造成的误差,这种情况叫做欠拟合,而复杂模型(右边)是方差过大造成的误差,这种情况叫做过拟合。
2.怎么判断?
分析
如果模型没有很好的训练训练集,就是偏差过大,也就是欠拟合
如果模型很好的训练训练集,即再训练集上得到很小的错误,但在测试集上得到大的错误,这意味着模型可能是方差比较大,就是过拟合。
对于欠拟合和过拟合,是用不同的方式来处理的
偏差大-欠拟合
此时应该重新设计模型。因为之前的函数集里面可能根本没有包含$f^*$。可以:
将更多的函数加进去,比如考虑高度重量,或者HP值等等。
或者考虑更多次幂、更复杂的模型。
如果此时强行再收集更多的data去训练,这是没有什么帮助的,因为设计的函数集本身就不好,再找更多的训练集也不会更好。
方差大-过拟合
简单粗暴的方法:更多的数据
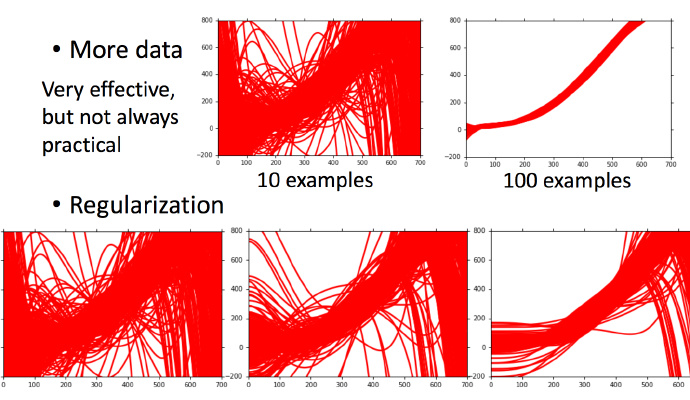
但是很多时候不一定能做到收集更多的data。可以针对对问题的理解对数据集做调整。比如识别手写数字的时候,偏转角度的数据集不够,那就将正常的数据集左转15度,右转15度,类似这样的处理。
3.模型选择
现在在偏差和方差之间就需要一个权衡
想选择的模型,可以平衡偏差和方差产生的错误,使得总错误最小
但是下面这件事最好不要做:
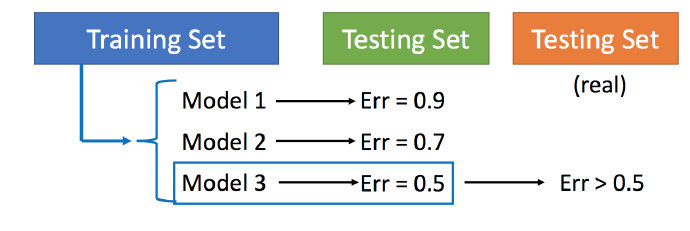
用训练集训练不同的模型,然后在测试集上比较错误,模型3的错误比较小,就认为模型3好。但实际上这只是你手上的测试集,真正完整的测试集并没有。比如在已有的测试集上错误是0.5,但有条件收集到更多的测试集后通常得到的错误都是大于0.5的。
交叉验证
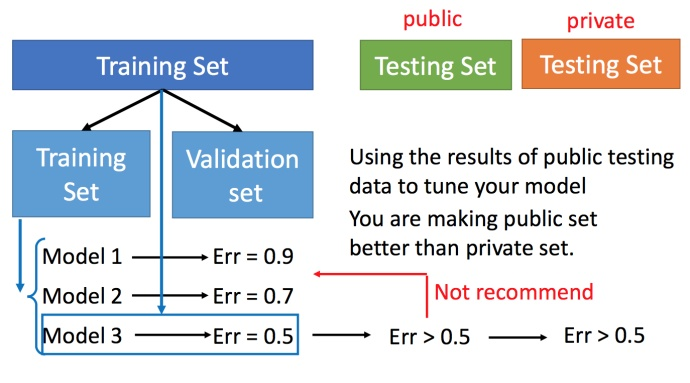
图中public的测试集是已有的,private是没有的,不知道的。交叉验证 就是将训练集再分为两部分,一部分作为训练集,一部分作为验证集。用训练集训练模型,然后再验证集上比较,确实出最好的模型之后(比如模型3),再用全部的训练集训练模型3,然后再用public的测试集进行测试,此时一般得到的错误都是大一些的。不过此时会比较想再回去调一下参数,调整模型,让在public的测试集上更好,但不太推荐这样。
上述方法可能会担心将训练集拆分的时候分的效果比较差怎么办,可以用下面的方法。
N-折交叉验证
将训练集分成N份,比如分成3份。
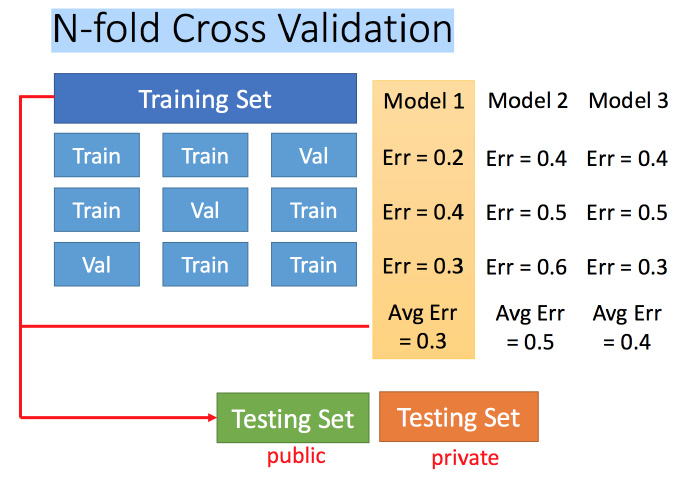
比如在三份中训练结果Average错误是模型1最好,再用全部训练集训练模型1。
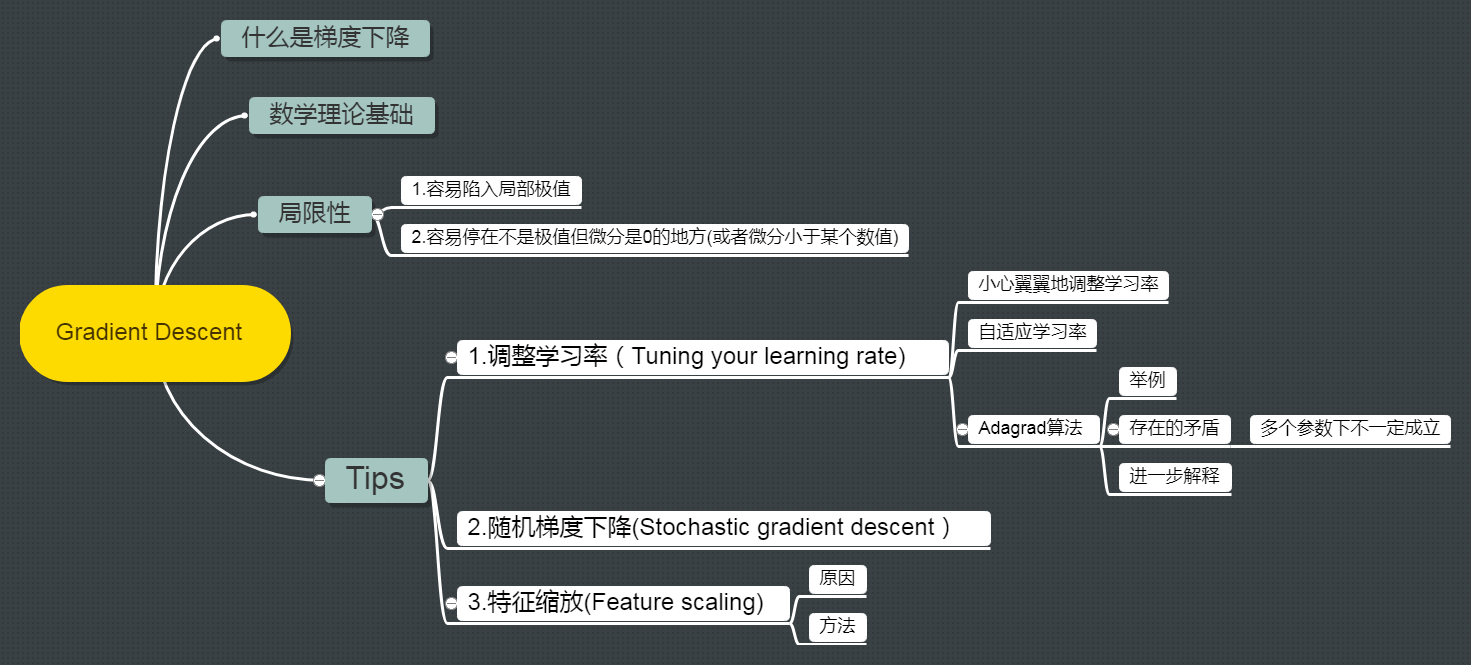
二、什么是梯度下降法?
Review: 梯度下降法
在回归问题的第三步中,需要解决下面的最优化问题:
$$\theta^∗= \underset{ \theta }{\operatorname{arg\ min}} L(\theta) \tag1$$
- $L$ :lossfunction(损失函数)
- $\theta$ :parameters(参数)
这里的parameters是复数,即 $\theta$ 指代一堆参数,比如上篇说到的 $w$ 和 $b$ 。
我们要找一组参数 $\theta$ ,让损失函数越小越好,这个问题可以用梯度下降法解决:
假设 $\theta$ 有里面有两个参数 $\theta_1, \theta_2$
随机选取初始值
$$
\theta^0 = \begin{bmatrix}
\theta_1^0 \
\theta_2^0
\end{bmatrix} \tag2
$$
这里可能某个平台不支持矩阵输入,看下图就好。
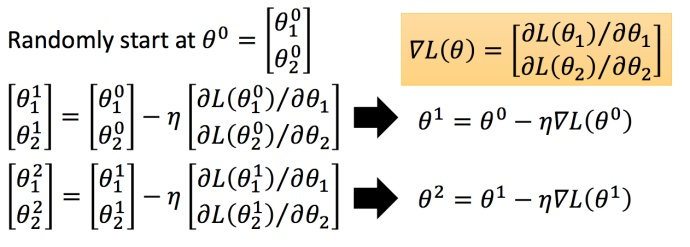
然后分别计算初始点处,两个参数对 $L$ 的偏微分,然后 $\theta^0$ 减掉 $\eta$ 乘上偏微分的值,得到一组新的参数。同理反复进行这样的计算。黄色部分为简洁的写法,$\triangledown L(\theta)$ 即为梯度。
$\eta$ 叫做Learning rates(学习速率)
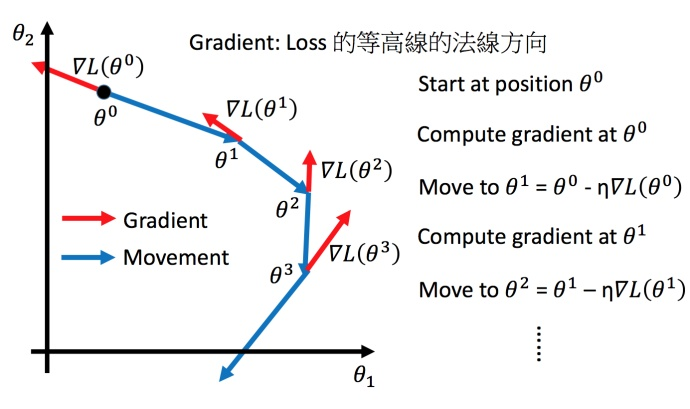
上图举例将梯度下降法的计算过程进行可视化。
Tip1:调整学习速率
小心翼翼地调整学习率
举例:
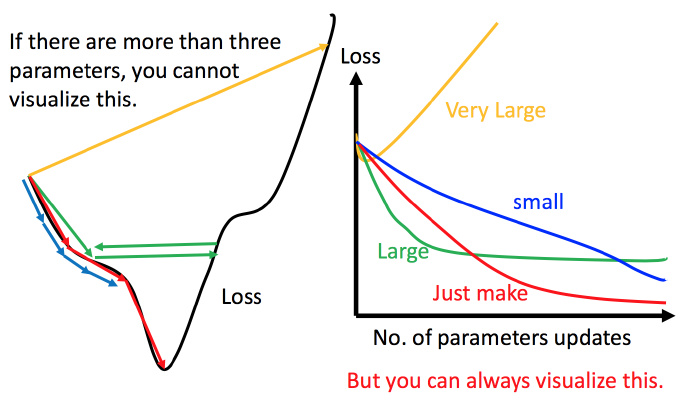
上图左边黑色为损失函数的曲线,假设从左边最高点开始,如果学习率调整的刚刚好,比如红色的线,就能顺利找到最低点。如果学习率调整的太小,比如蓝色的线,就会走的太慢,虽然这种情况给足够多的时间也可以找到最低点,实际情况可能会等不及出结果。如果 学习率调整的有点大,比如绿色的线,就会在上面震荡,走不下去,永远无法到达最低点。还有可能非常大,比如黄色的线,直接就飞出去了,更新参数的时候只会发现损失函数越更新越大。
虽然这样的可视化可以很直观观察,但可视化也只是能在参数是一维或者二维的时候进行,更高维的情况已经无法可视化了。
解决方法就是上图右边的方案,将参数改变对损失函数的影响进行可视化。比如学习率太小(蓝色的线),损失函数下降的非常慢;学习率太大(绿色的线),损失函数下降很快,但马上就卡住不下降了;学习率特别大(黄色的线),损失函数就飞出去了;红色的就是差不多刚好,可以得到一个好的结果。
自适应学习率
举一个简单的思想:随着次数的增加,通过一些因子来减少学习率
通常刚开始,初始点会距离最低点比较远,所以使用大一点的学习率
update好几次参数之后呢,比较靠近最低点了,此时减少学习率
比如 $\eta^t =\frac{\eta^t}{\sqrt{t+1}}$,$t$ 是次数。随着次数的增加,$\eta^t$ 减小
学习率不能是一个值通用所有特征,不同的参数需要不同的学习率
Adagrad 算法
Adagrad 是什么?
每个参数的学习率都把它除上之前微分的均方根。解释:
普通的梯度下降为:
$$w^{t+1} \leftarrow w^t -η^tg^t \tag3$$
$$\eta^t =\frac{\eta^t}{\sqrt{t+1}} \tag4$$
- $w$ 是一个参数
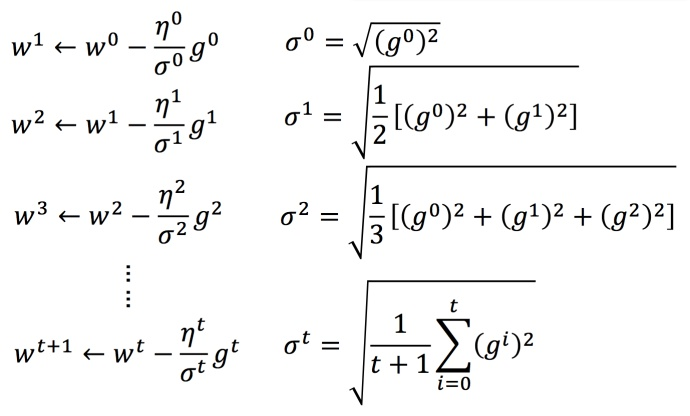
Adagrad 可以做的更好:
$$w^{t+1} \leftarrow w^t -\frac{η^t}{\sigma^t}g^t \tag5$$
$$g^t =\frac{\partial L(\theta^t)}{\partial w} \tag6$$
- $\sigma^t$ :之前参数的所有微分的均方根,对于每个参数都是不一样的。
Adagrad举例
下图是一个参数的更新过程
将 Adagrad 的式子进行化简: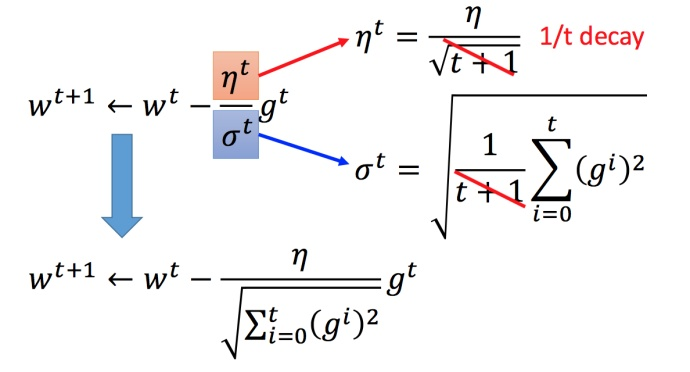
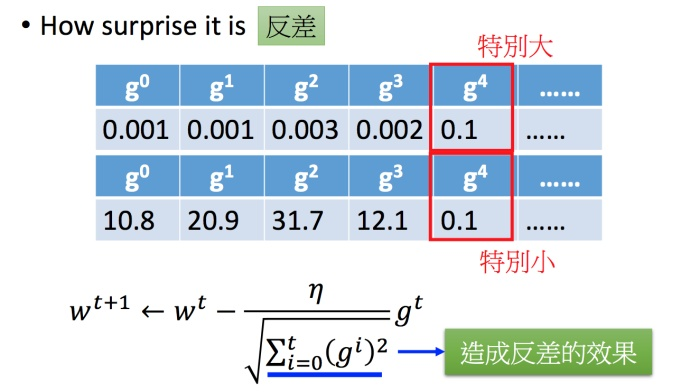
Adagrad 存在的矛盾?
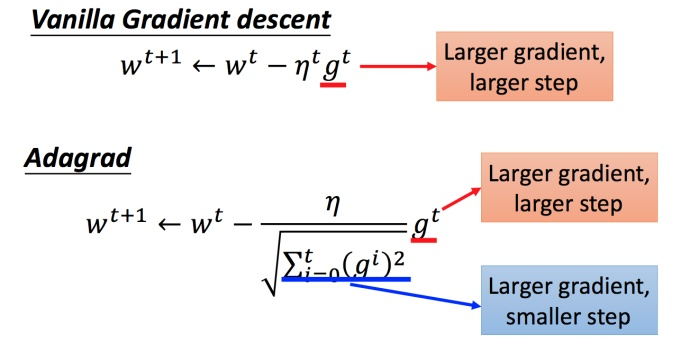
在 Adagrad 中,当梯度越大的时候,步伐应该越大,但下面分母又导致当梯度越大的时候,步伐会越小。
下图是一个直观的解释:
下面给一个正式的解释:
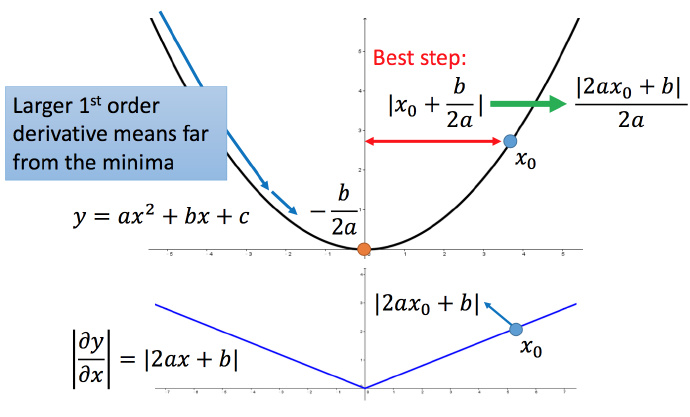
比如初始点在 $x_0$,最低点为 $−\frac{b}{2a}$,最佳的步伐就是 $x0$ 到最低点之间的距离 $\left | x_0+\frac{b}{2a} \right |$,也可以写成 $\left | \frac{2ax_0+b}{2a} \right |$。而刚好 $|2ax_0+b|$ 就是方程绝对值在 $x_0$ 这一点的微分。
这样可以认为如果算出来的微分越大,则距离最低点越远。而且最好的步伐和微分的大小成正比。所以如果踏出去的步伐和微分成正比,它可能是比较好的。
结论1-1:梯度越大,就跟最低点的距离越远。
这个结论在多个参数的时候就不一定成立了。
多参数下结论不一定成立
对比不同的参数
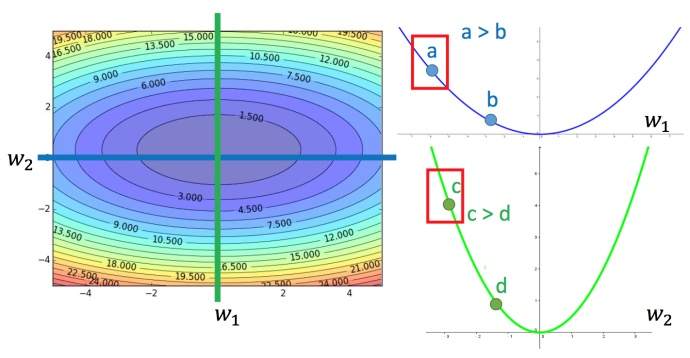
上图左边是两个参数的损失函数,颜色代表损失函数的值。如果只考虑参数 $w_1$,就像图中蓝色的线,得到右边上图结果;如果只考虑参数 $w_2$,就像图中绿色的线,得到右边下图的结果。确实对于 $a$ 和 $b$,结论1-1是成立的,同理 $c$ 和 $b$ 也成立。但是如果对比$a$ 和 $c$,就不成立了,$c$ 比 $a$ 大,但 $c$ 距离最低点是比较近的。
所以结论1-1是在没有考虑跨参数对比的情况下,才能成立的。所以还不完善。
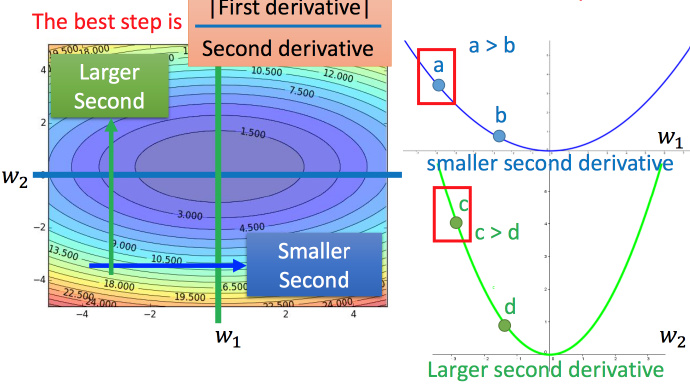
之前说到的最佳距离 $\left | \frac{2ax_0+b}{2a} \right |$,还有个分母 $2a$ 。对function进行二次微分刚好可以得到:
$$\frac{\partial ^2y}{\partial x^2} = 2a \tag7$$
所以最好的步伐应该是:
$$\frac{一次微分}{二次微分}$$
即不止和一次微分成正比,还和二次微分成反比。最好的step应该考虑到二次微分:
Adagrad 进一步的解释
再回到之前的 Adagrad
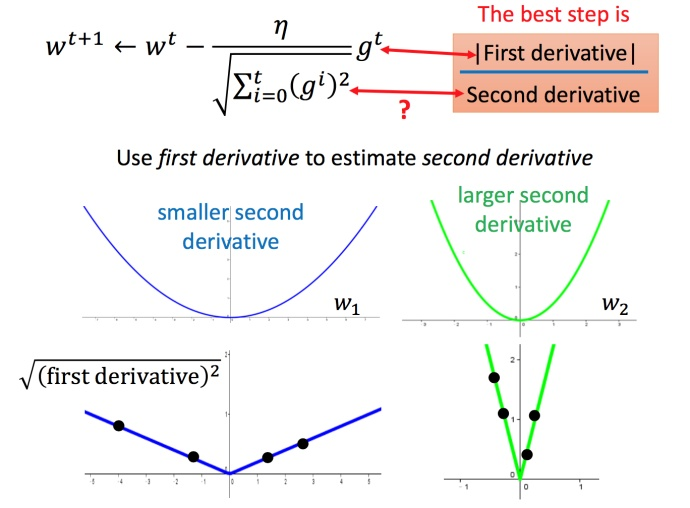
对于 $\sqrt{\sum_{i=0}^t(g^i)^2}$ 就是希望再尽可能不增加过多运算的情况下模拟二次微分。(如果计算二次微分,在实际情况中可能会增加很多的时间消耗)
Tip2:随机梯度下降法
之前的梯度下降:
$$L=\sum_n(\hat y^n-(b+\sum w_ix_i^n))^2 \tag8$$
$$\theta^i =\theta^{i-1}- \eta\triangledown L(\theta^{i-1}) \tag9$$
而随机梯度下降法更快:
损失函数不需要处理训练集所有的数据,选取一个例子 $x^n$
$$L=(\hat y^n-(b+\sum w_ix_i^n))^2 \tag{10}$$
$$\theta^i =\theta^{i-1}- \eta\triangledown L^n(\theta^{i-1}) \tag{11}$$
此时不需要像之前那样对所有的数据进行处理,只需要计算某一个例子的损失函数Ln,就可以赶紧update 梯度。
对比:
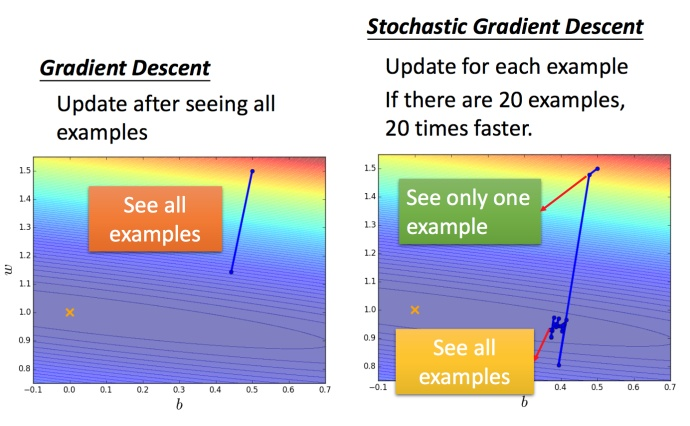
常规梯度下降法走一步要处理到所有二十个例子,但随机算法此时已经走了二十步(每处理一个例子就更新)
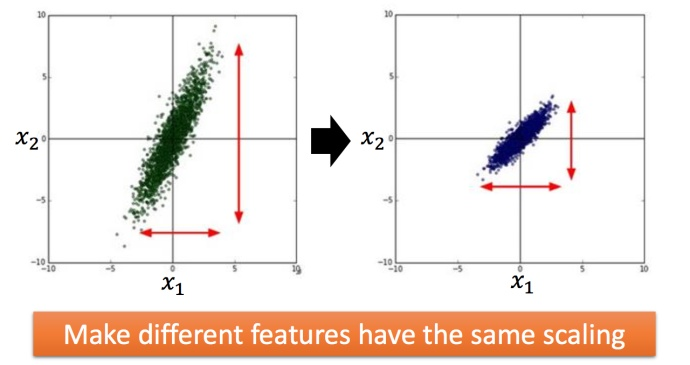
Tip3:特征缩放
比如有个函数:
$$y=b+w_1x_1+w_2x_2 \tag{12}$$
两个输入的分布的范围很不一样,建议把他们的范围缩放,使得不同输入的范围是一样的。
为什么要这样做?
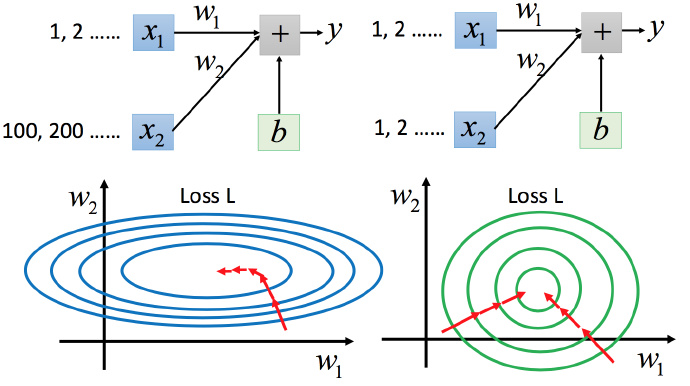
上图左边是 $x_1$ 的scale比 $x_2$ 要小很多,所以当 $w_1$ 和 $w_2$ 做同样的变化时,$w_1$ 对 $y$ 的变化影响是比较小的,$x_2$ 对 $y$ 的变化影响是比较大的。
坐标系中是两个参数的error surface(现在考虑左边蓝色),因为 $w_1$ 对 $y$ 的变化影响比较小,所以 $w_1$ 对损失函数的影响比较小,$w_1$ 对损失函数有比较小的微分,所以 $w_1$ 方向上是比较平滑的。同理 $x_2$ 对 $y$ 的影响比较大,所以 $x_2$ 对损失函数的影响比较大,所以在 $x_2$ 方向有比较尖的峡谷。
上图右边是两个参数scaling比较接近,右边的绿色图就比较接近圆形。
对于左边的情况,上面讲过这种狭长的情形不过不用Adagrad的话是比较难处理的,两个方向上需要不同的学习率,同一组学习率会搞不定它。而右边情形更新参数就会变得比较容易。左边的梯度下降并不是向着最低点方向走的,而是顺着等高线切线法线方向走的。但绿色就可以向着圆心(最低点)走,这样做参数更新也是比较有效率。
怎么做缩放?
方法非常多,这里举例一种常见的做法:
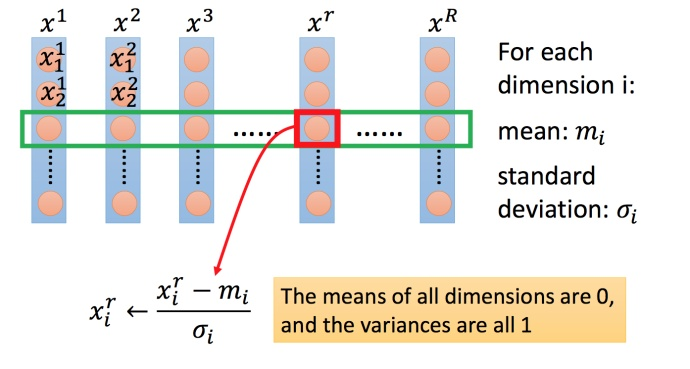
上图每一列都是一个例子,里面都有一组特征。
对每一个维度 $i$(绿色框)都计算平均数,记做 $m_i$;还要计算标准差,记做 $\sigma _i$。
然后用第 $r$ 个例子中的第 $i$ 个输入,减掉平均数 $m_i$,然后除以标准差 $\sigma _i$,得到的结果是所有的维数都是 $0$,所有的方差都是 $1$
①梯度下降的理论基础
问题:当用梯度下降解决问题:
$$\theta^∗= \underset{ \theta }{\operatorname{arg\ min}} L(\theta) \tag1$$
每次更新参数 $\theta$,都得到一个新的 $\theta$,它都使得损失函数更小。即:
$$L(\theta^0) >L(\theta^1)>L(\theta^2)>···\tag{13}$$
上述结论正确吗?
结论是不正确的。。。
②数学理论
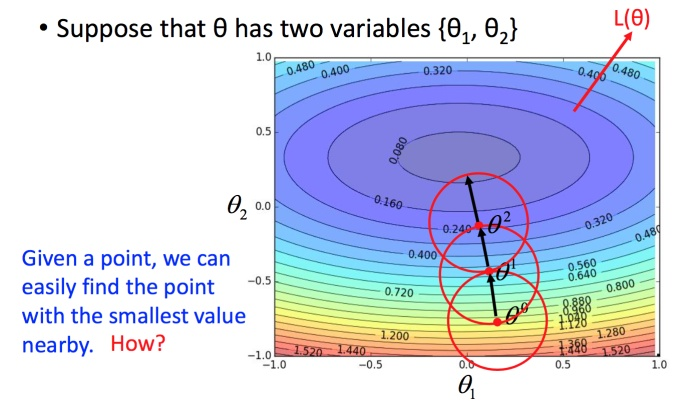
比如在 $\theta^0$ 处,可以在一个小范围的圆圈内找到损失函数细小的 $\theta^1$,不断的这样去寻找。
接下来就是如果在小圆圈内快速的找到最小值?
泰勒展开式
先介绍一下泰勒展开式
定义 若 $h(x)$ 在 $x=x_0$ 点的某个领域内有无限阶导数(即无限可微分,infinitely differentiable),那么在此领域内有:
$$
\begin{aligned}
h(x) &= \sum_{k=0}^{\infty }\frac{h^k(x_0)}{k!}(x-x_0)^k \
& =h(x_0)+{h}’(x_0)(x−x_0)+\frac{h’’(x_0)}{2!}(x−x_0)^2+⋯
\tag{14}
\end{aligned}
$$
当 $x$ 很接近 $x_0$ 时,有 $h(x)≈h(x_0)+{h}’(x_0)(x−x_0)$
式14 就是函数 $h(x)$ 在 $x=x_0$ 点附近关于 $x$ 的幂函数展开式,也叫泰勒展开式。
举例:
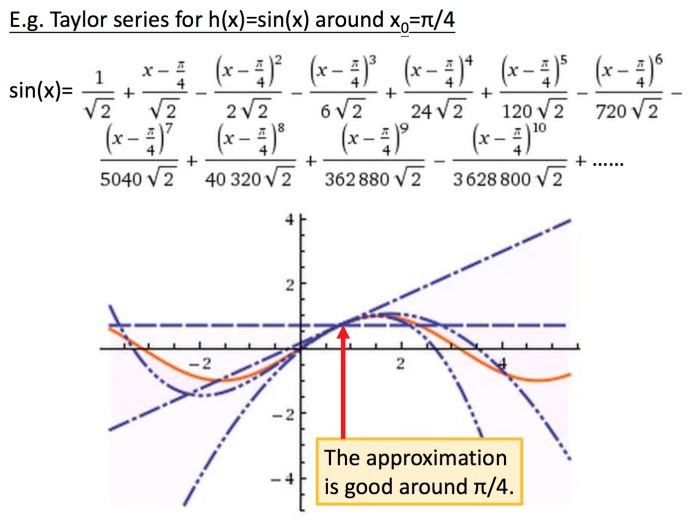
图中3条蓝色线是把前3项作图,橙色线是 $sin(x)$。
多变量泰勒展开式
下面是两个变量的泰勒展开式
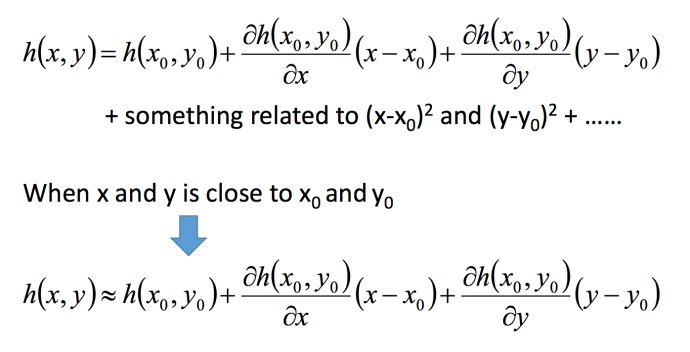
利用泰勒展开式简化
回到之前如何快速在圆圈内找到最小值。基于泰勒展开式,在 $(a,b)$ 点的红色圆圈范围内,可以将损失函数用泰勒展开式进行简化:
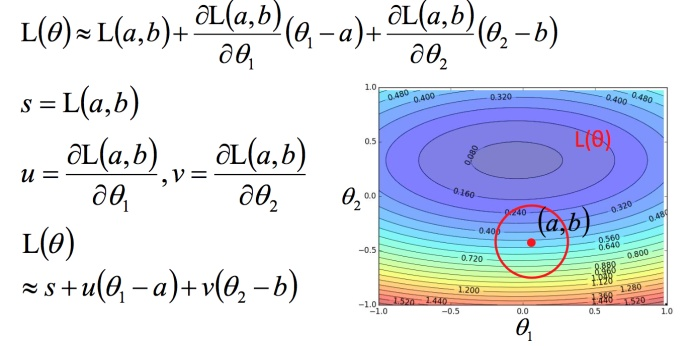
将问题进而简化为下图:
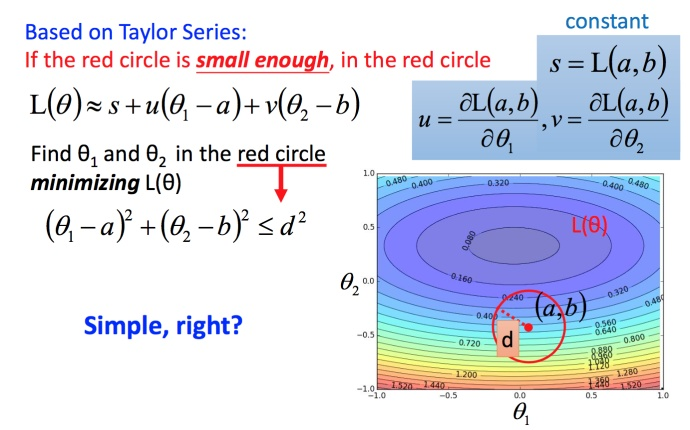
不考虑s的话,可以看出剩下的部分就是两个向量$(\triangle \theta_1,\triangle \theta_2)$ 和 $(u,v)$ 的内积,那怎样让它最小,就是和向量 $(u,v)$ 方向相反的向量
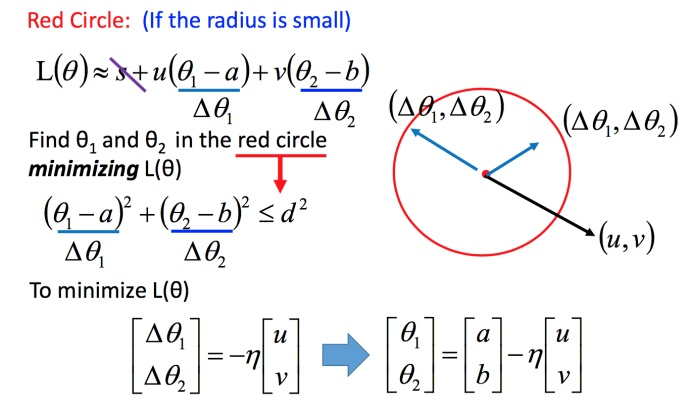
然后将u和v带入。
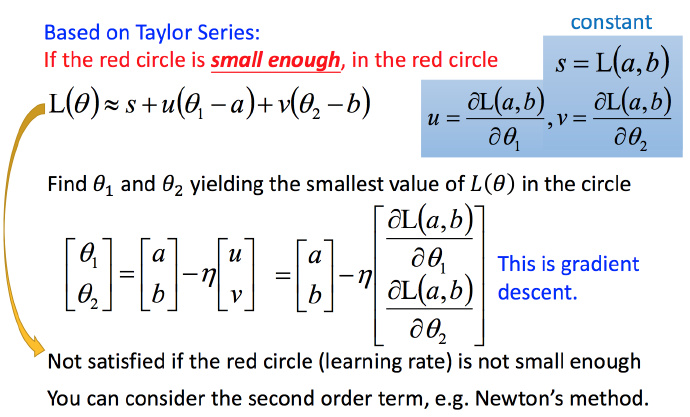
$$L(\theta)\approx s+u(\theta_1 - a)+v(\theta_2 - b) \tag{14}$$
发现最后的式子就是梯度下降的式子。但这里用这种方法找到这个式子有个前提,泰勒展开式给的损失函数的估算值是要足够精确的,而这需要红色的圈圈足够小(也就是学习率足够小)来保证。所以理论上每次更新参数都想要损失函数减小的话,即保证式1-2 成立的话,就需要学习率足够足够小才可以。
所以实际中,当更新参数的时候,如果学习率没有设好,是有可能式1-2是不成立的,所以导致做梯度下降的时候,损失函数没有越来越小。
式1-2只考虑了泰勒展开式的一次项,如果考虑到二次项(比如牛顿法),在实际中不是特别好,会涉及到二次微分等,多很多的运算,性价比不好。
③梯度下降的限制
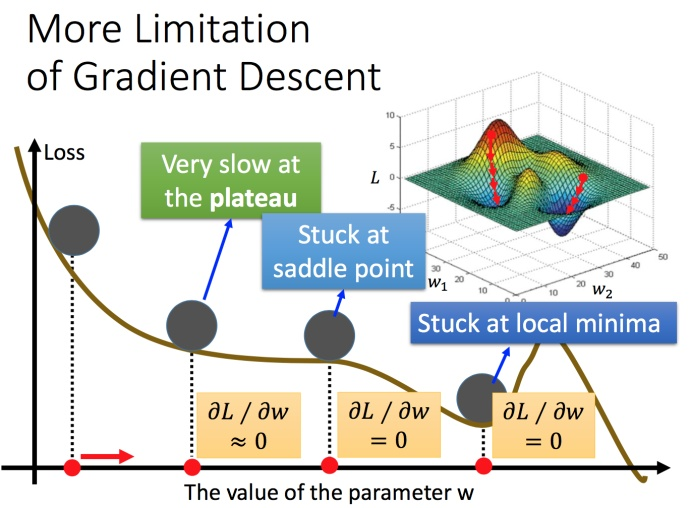
容易陷入局部极值
还有可能卡在不是极值,但微分值是0的地方
还有可能实际中只是当微分值小于某一个数值就停下来了,但这里只是比较平缓,并不是极值点
三、Gradient Descent (Demo by AOE)
- 利用帝国时代的方式模拟梯度下降;
- 在地图上大多数位置我们是未知的,只有我们单位走过的地方是可知;
- 地图上的海拔可以看作损失函数loss function,我们的目的就是寻找海拔的最低点的值;
- 随机初始一个位置,朝向较低的方向移动,周而复始,直到local minimal(在不开天眼的情况下,你始终不会知晓所在位置是否为global minimal)。
四、Gradient Descent (Demo by Minecraft)
- 利用梯度下降法更新参数,损失函数loss function可能会不降反升(利用Mincraft解释该情况);
- 人物的前方是较低方向,右方也是较低方向,利用梯度下降法,往右前方移动一步,然后反复用梯度下降法,往右前方移动一步,周而复始;
- 尽管前方和右方是下降的方向,但往右前方移动,将会失败(因为实际右前方是比较高的地方)。